노션에다 정리해봤는데.. 노션에서 작성된 형식을 그대로 옮기는게 불편하네요..Written by Myeonggyun-KimContinuous State Space Model of Linear Time invariant Systemx˙=Ax(t)+Bu(t)y(t)=Cx(t)+Du(t),t≥0{\dot x} = Ax(t)+Bu(t) \\ y(t) = Cx(t)+ Du(t), t\geq 0x˙=Ax(t)+Bu(t)y(t)=Cx(t)+Du(t),t≥0, (1) The matrix exponential function asddteAt=AeAt=eAtA{d\over dt}e^{At} =Ae^{At}=e^{At}A dtdeAt=AeAt=eAtA, (2) Multiplying both sides of (1) bye−..
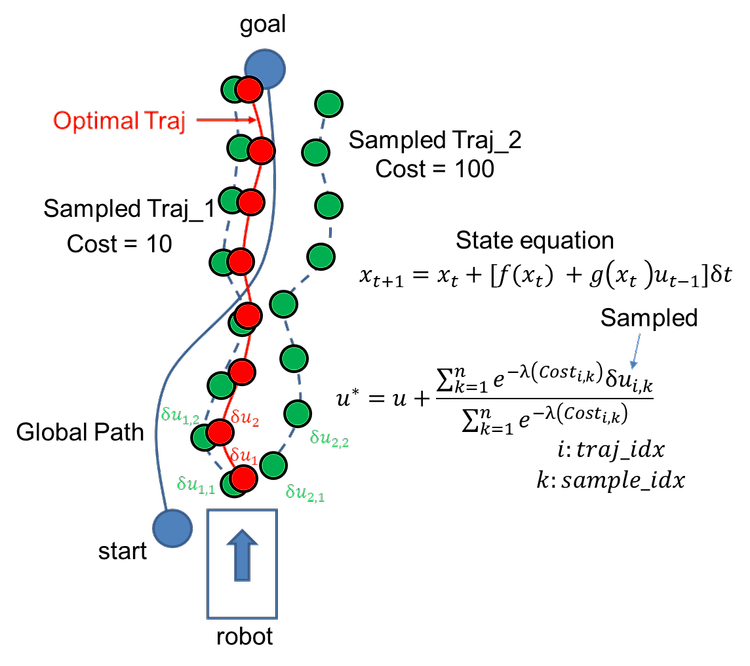
G. Williams, P. Drews, B. Goldfain, J. M. Rehg and E. A. Theodorou, "Aggressive driving with model predictive path integral control," 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 2016, pp. 1433-1440, doi: 10.1109/ICRA.2016.7487277. keywords: {Trajectory;Optimal control;Entropy;Vehicles;Prediction algorithms;Q measurement;Stochastic processes}, https://..
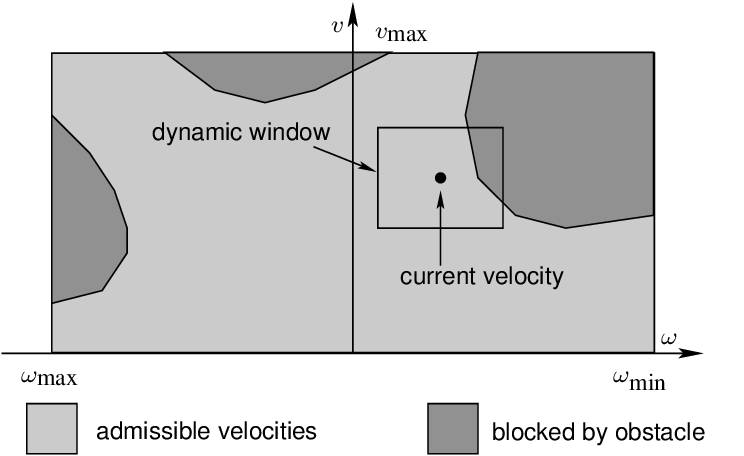
Dynamic Window Approach https://www.ri.cmu.edu/pub_files/pub1/fox_dieter_1997_1/fox_dieter_1997_1.pdf Fox, D., Burgard, W., & Thrun, S. (1997). The dynamic window approach to collision avoidance. IEEE Robotics & Automation Magazine, 4(1), 23-33. https://navigation.ros.org/configuration/packages/configuring-dwb-controller.html DWB Controller — Nav2 1.0.0 documentation DWB Controller Source code o..