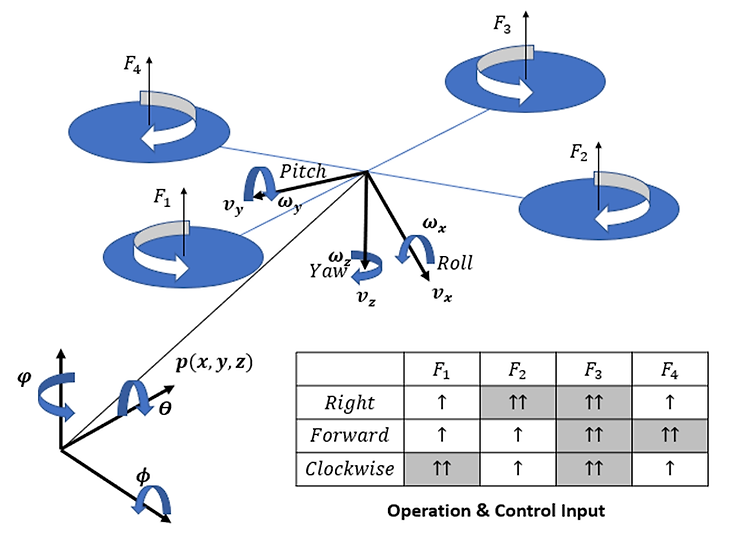
단순 Throttle Input - 초기 Throttle = 10N 이후 9.80N 높이축이 중력을 이겨내고 상승 이후 Throttle이 중력을 이기지 못하고 하강하는 것을 볼 수 있음. 참조 - Lim, Jeonggeun. “Autonomous target following and monitoring with collision avoidance based on an Lidar on a multi-copter” https://www.cs.cmu.edu/afs/cs.cmu.edu/academic/class/16311/www/s15/syllabus/ppp/Lec08-Control3.pdf
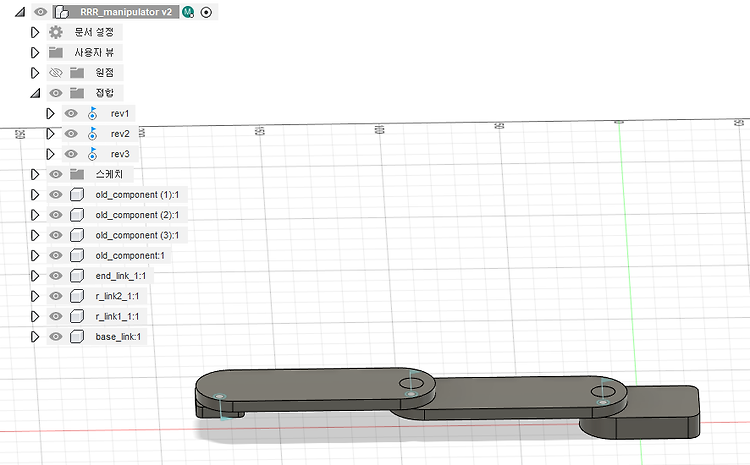
Fusion 360 X axis - 정면 방향 Y axis - 측면 방향 Z axis - 윗면 방향 ROS X axis - 정면 방향 Y axis - 측면 방향 Z axis - 중력의 반대 방향 캐드 프로그램과 ROS는 각각 좌표계를 정의하고 있으므로 이를 고려하여 설계를 진행해야하고 이후 ROS 좌표계에서 원하는 방향으로 배치해야한다. 변환하는 스크립트는 맨 아래 영상을 참고하고 설계할 때 접합 하는 순서에 유의해야한다. 접합 시 구성요소1은 child link가 되야하고 구성요소2는 parent link가 되야함. 안그러면 export가 되지 않는다. URDF는 visual model과 collision 모델을 정의하며 '0'값은 매우작은 부동소수점 자료형의 근사값으로 변환되기도 하고 Inertia ..
2주전 즈음 multi agent의 충돌 문제와 관련된 논문을 읽다가 관심이 좀 생겼는데, 좀 더 큰 틀에서의 문제에 대해 알아보고 이후에 시간내서 알아볼 예정 AGV (Automated Guided Vehicle)은 물류/유통 센터나 공항 터미널 시설에서 많이 활용된다고 한다. 물류 분야에서 보면 Amazon Robotics가 처음 도입했던 RMFS ( Robotic Mobile Fulfillment System)이 있다. 이 시스템은 피킹을 위해 작업자가 선반까지 이동하는 대신 AGV와 함께 협업 함에 따라 소요되던 시간의 절반 이상을 절약할 수 있었는데, 이는 장애물이 없는 정해진 공간 환경에서 반복/지속적인 작업을 수행 하는 것이 매우 효과적이기 때문이다. - 물류센터와 같은 환경에 로봇을 도입함..

Velocity Obstacle이 무엇인지 -> [클릭] VO :: Velocity Obstacles 문제 각 에이전트는 서로 통신하지 않고 독립적으로 탐색, 장애물 및 환경의 다른 에이전트와 충돌하지 않아야함 A와 B를 같은 환경에서 주행하는 로봇이라고 하자. A와 B는 각 자신을 기준으로 robonote.tistory.com Reciprocal Velocity Obstacles는 Velocity Obstacle을 multi-agent system에 적용하였을때 발생하는 Oscillation 문제를 해결한 것이 주요 Contribution이고 Velocity Obstacle의 Symmetry, Translation Invariance등 주요 성질을 이용해서 RVO가 Collision Avoidance와..