Fusion 360
X axis - 정면 방향
Y axis - 측면 방향
Z axis - 윗면 방향
ROS
X axis - 정면 방향
Y axis - 측면 방향
Z axis - 중력의 반대 방향
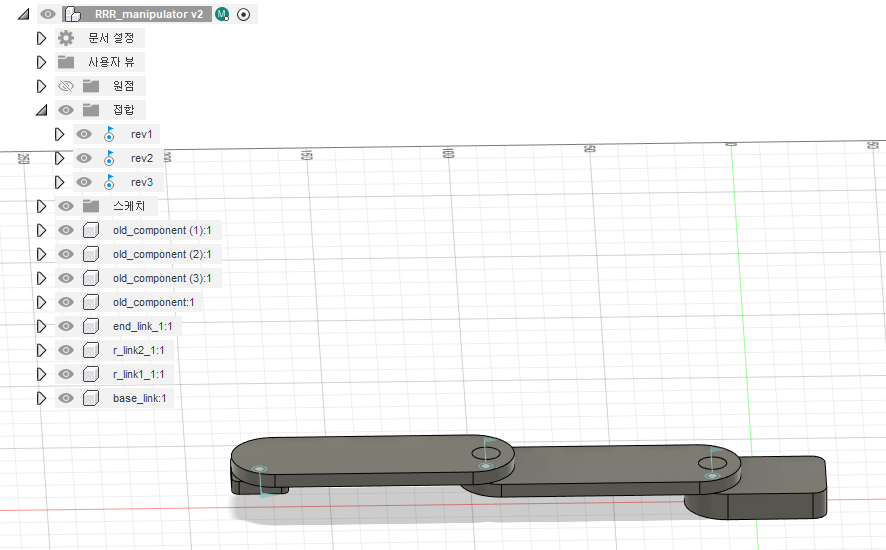
캐드 프로그램과 ROS는 각각 좌표계를 정의하고 있으므로 이를 고려하여 설계를 진행해야하고 이후 ROS 좌표계에서 원하는 방향으로 배치해야한다.
변환하는 스크립트는 맨 아래 영상을 참고하고 설계할 때 접합 하는 순서에 유의해야한다.
접합 시 구성요소1은 child link가 되야하고 구성요소2는 parent link가 되야함. 안그러면 export가 되지 않는다.
URDF는 visual model과 collision 모델을 정의하며 '0'값은 매우작은 부동소수점 자료형의 근사값으로 변환되기도 하고 Inertia property는 부정확하게 변형됨.

https://github.com/syuntoku14/fusion2urdf/
GitHub - syuntoku14/fusion2urdf: A Fusion 360 Script to export URDF
A Fusion 360 Script to export URDF. Contribute to syuntoku14/fusion2urdf development by creating an account on GitHub.
github.com
https://www.youtube.com/watch?v=cQh0gNfb6ro
'maengkyun > 끄적' 카테고리의 다른 글
| Stereo Camera의 Depth와 실제 물리적 거리와의 오차 테스트 (0) | 2023.05.21 |
|---|---|
| 마크다운 (0) | 2022.11.30 |
| 짐벌 제작.. (0) | 2022.10.14 |
