 쿼드콥터 동역학 모델링_v4.pdf
0.48MB
쿼드콥터 동역학 모델링_v4.pdf
0.48MB

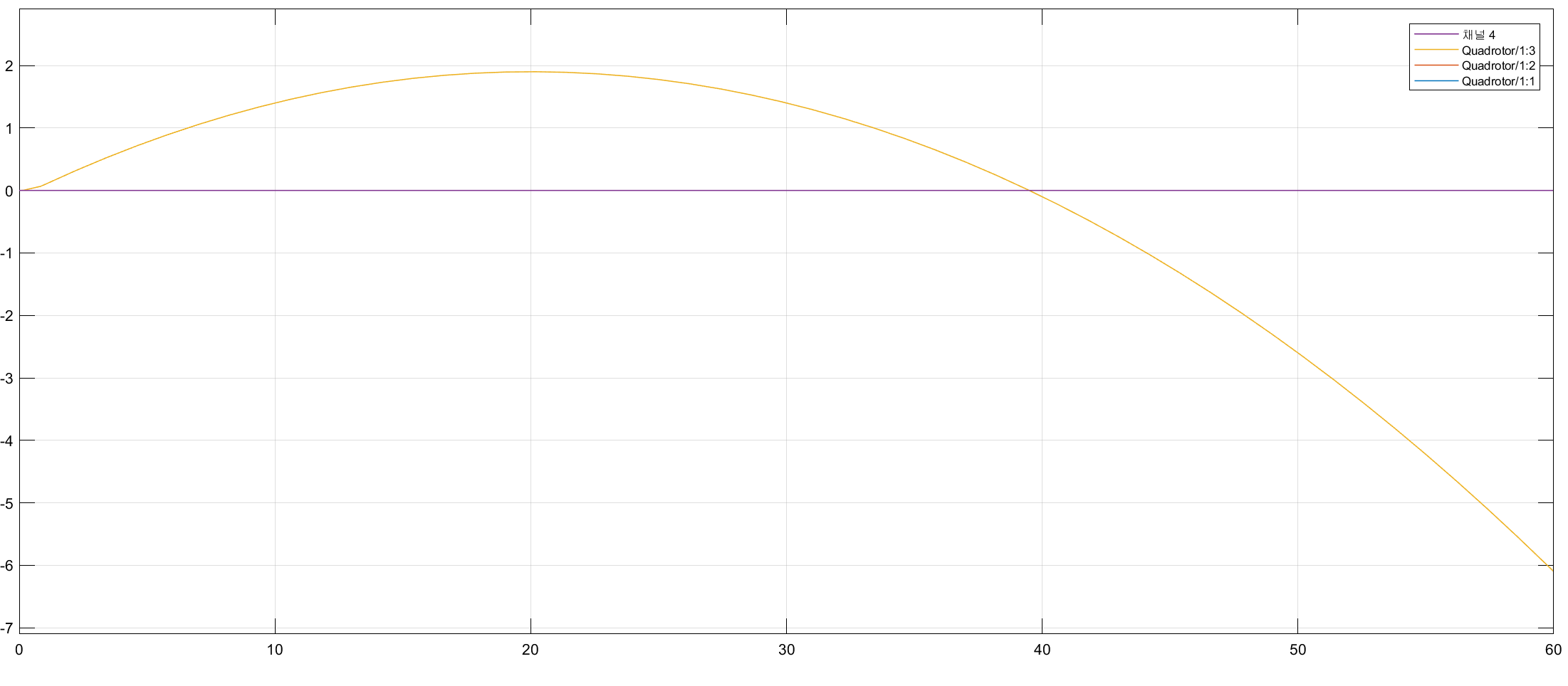
단순 Throttle Input - 초기 Throttle = 10N 이후 9.80N
높이축이 중력을 이겨내고 상승 이후 Throttle이 중력을 이기지 못하고 하강하는 것을 볼 수 있음.
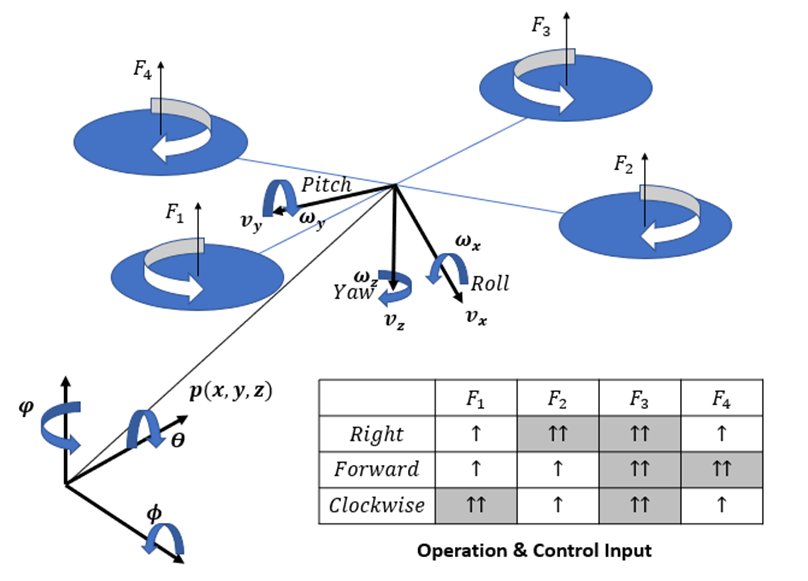
참조 - Lim, Jeonggeun. “Autonomous target following and monitoring with collision avoidance based on an Lidar on a multi-copter”
https://www.cs.cmu.edu/afs/cs.cmu.edu/academic/class/16311/www/s15/syllabus/ppp/Lec08-Control3.pdf
'maengkyun > Robotics' 카테고리의 다른 글
| 쿼드로터 슬라이딩 모드 자세 제어 (0) | 2023.02.14 |
|---|---|
| 쿼드로터 위치 및 자세 제어 (0) | 2023.02.12 |
| Multi-Agent Path Finding이 무엇일까. . . (6) | 2023.01.05 |
| RVO :: Reciprocal Velocity Obstacles (0) | 2022.12.20 |
| VO :: Velocity Obstacles (0) | 2022.12.15 |
