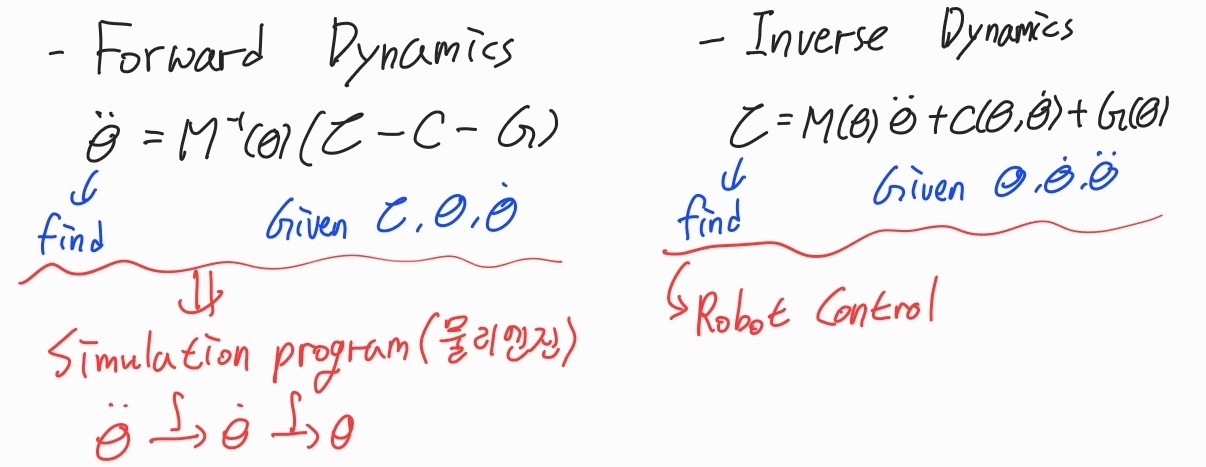
Forward Dynamics는 주어진 토크, 각도, 각속도를 이용해 각가속도를 구하고(simluation에 주로 사용)
Inverse Dynamics는 각도, 각속도, 각가속도를 이용해 토크를 구한다.(실제 로봇 제어에 사용)

Inverse Dynamics는 Lagrangian 과 Newton-Euler 방식이 있고 이 중 Lagrangian formulation 에 대해 알아보았다.
Lagrangian function은 kinetic energy(운동 에너지)와 potential energy(위치 에너지)의 차로 구해지고
이렇게 구한 Lagrangian function을 이용해 위와 같이 토크를 구할 수 있다.
또한 n개의 링크를 가진 매니퓰레이터의 Lagrangian function을 구할 경우
모든 링크의 kinetic energy의 합과 potential energy의 합을 뺀다.
아래에서는 위의 방식을 이용해 2-link planar의 토크를 구하였다.


이렇게 구한 토크의 각 요소들을 M, C, G의 집합으로 만들 수 있고 여기서 M은 nxn mass matrix,
C는 centrifugal(원심력)&Coriolis torque, G는 gravitational torque를 의미한다.

'seungchul > Robotics' 카테고리의 다른 글
| Computed Torque Control (0) | 2021.07.25 |
|---|
