[Kalman Filter] SORT(Simple Online and Realtime Tracking)
maengkyun/Robotics
2022. 6. 14. 21:04
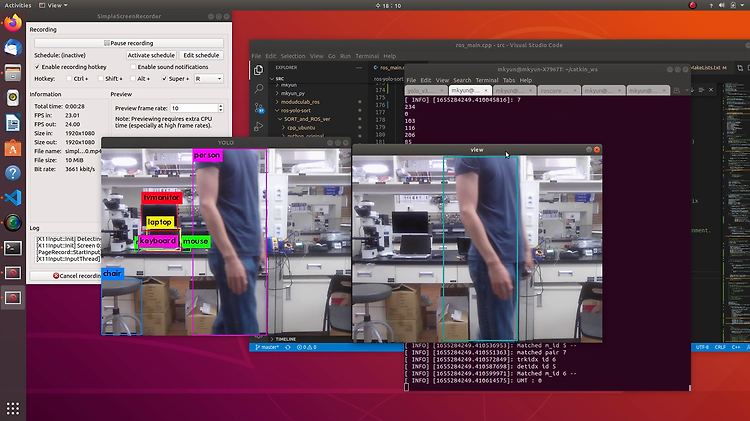
Darknet은 별도로 실행시키셔서 Published Bounding Boxes를 칼만필터 이용해 Tracking 합니다. Tracked Boxes는 다시 publishing 합니다. CPP 수정하다가 멈춘 파일을 발견해서 Ros에서 작동되게끔 수정해보았습니다. https://github.com/mkyun2/ROS_SORT GitHub - mkyun2/ROS_SORT Contribute to mkyun2/ROS_SORT development by creating an account on GitHub. github.com Blue:Prediction Green:Measurement Red:Correction Process Noise Measu..