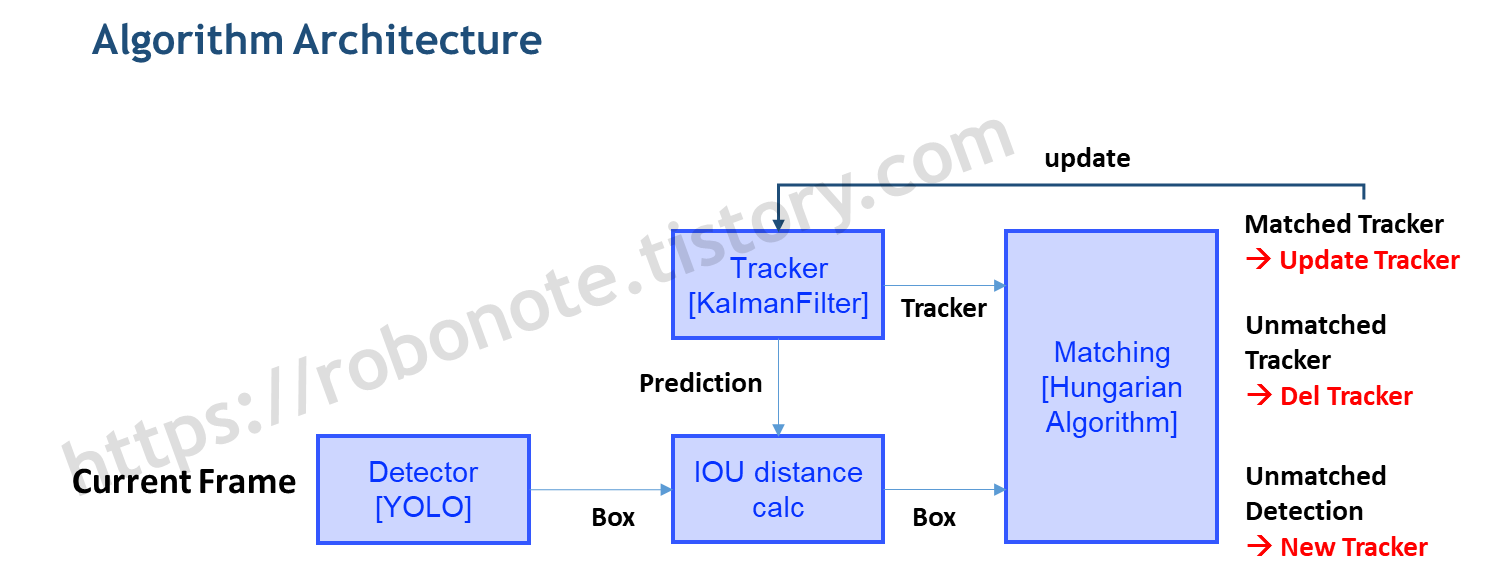


Darknet은 별도로 실행시키셔서 Published Bounding Boxes를 칼만필터 이용해 Tracking 합니다.
Tracked Boxes는 다시 publishing 합니다.
CPP 수정하다가 멈춘 파일을 발견해서 Ros에서 작동되게끔 수정해보았습니다.
https://github.com/mkyun2/ROS_SORT
GitHub - mkyun2/ROS_SORT
Contribute to mkyun2/ROS_SORT development by creating an account on GitHub.
github.com
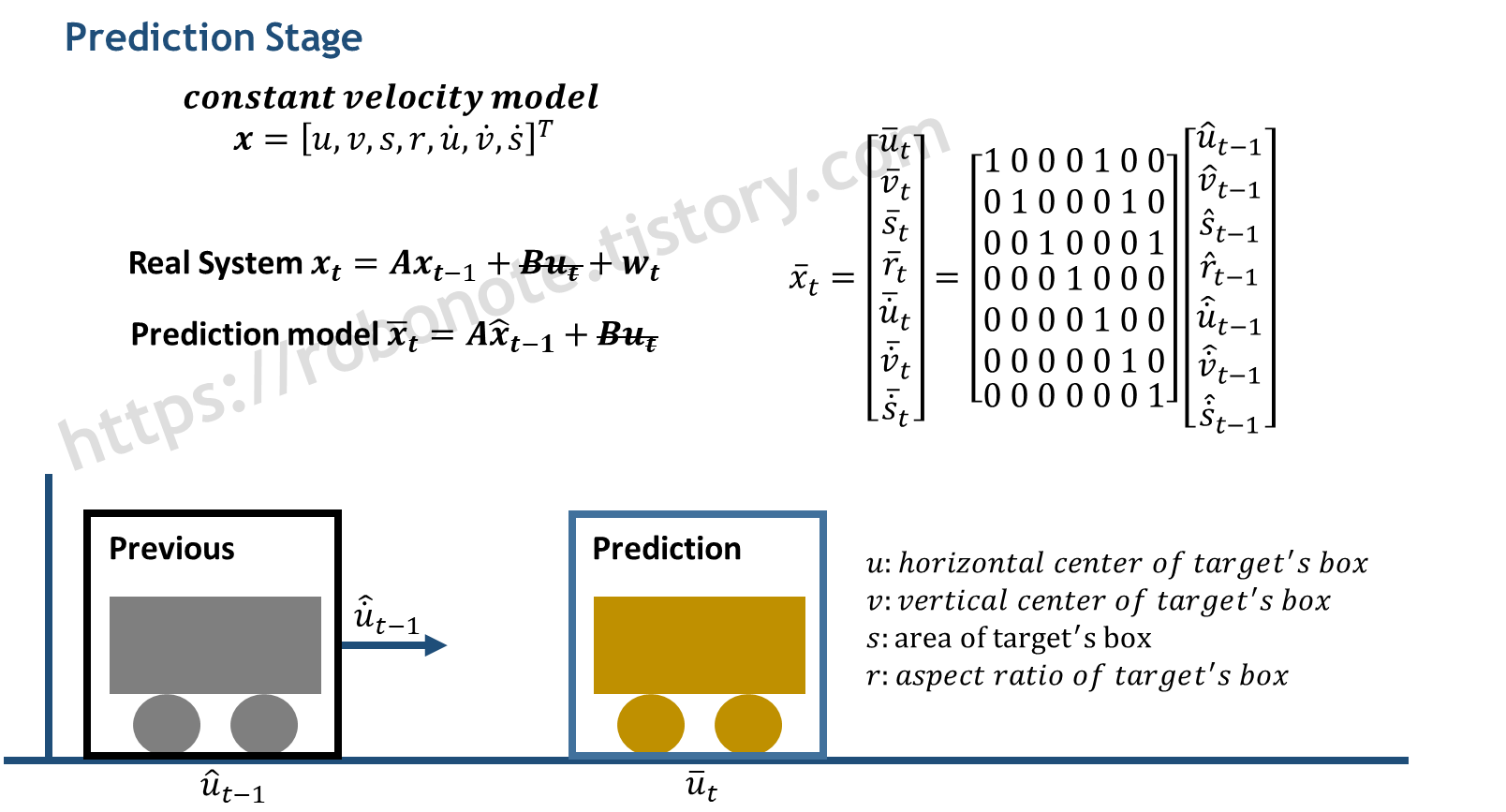
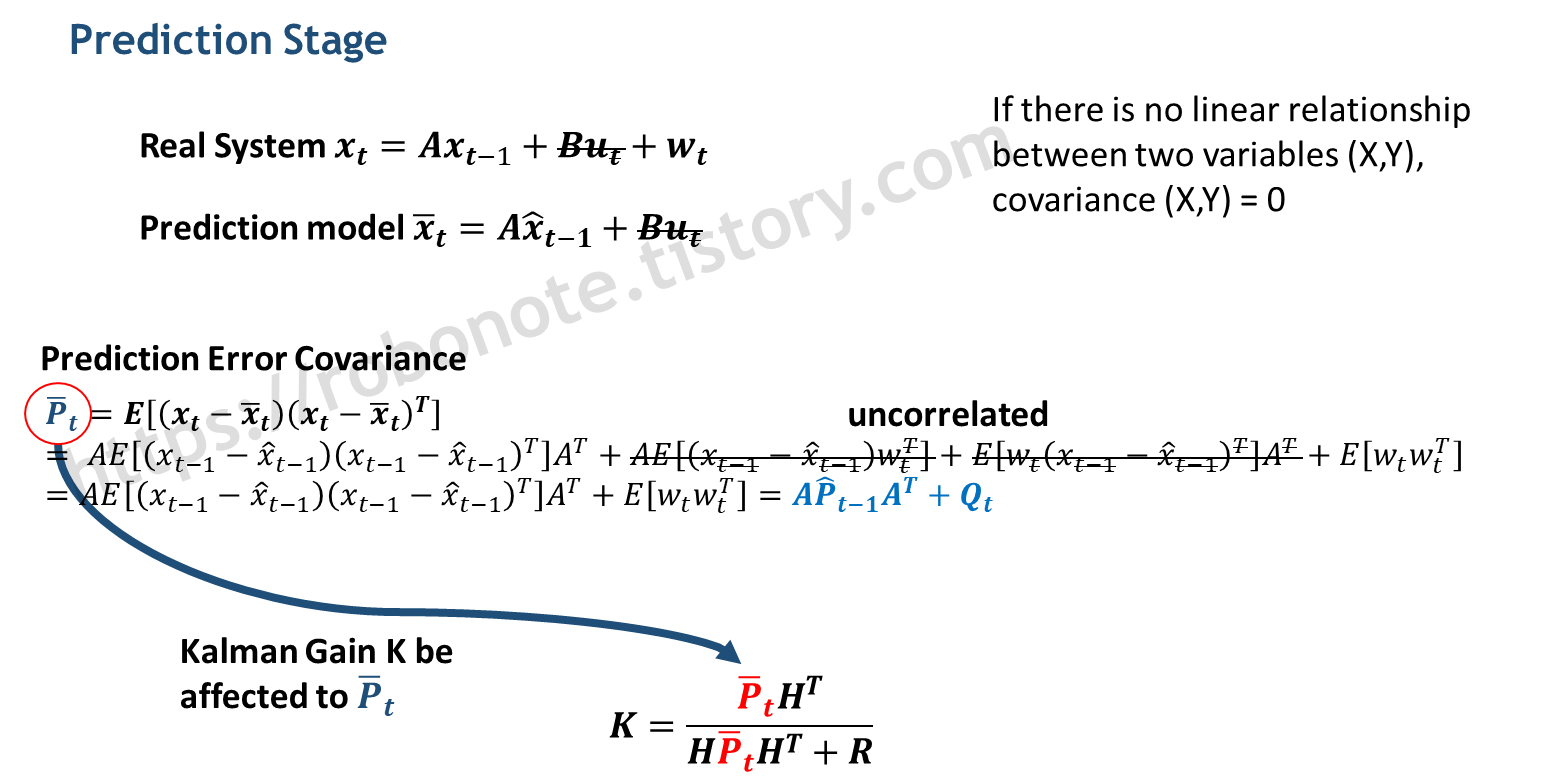
Blue:Prediction
Green:Measurement
Red:Correction

Test Environment
Ubuntu 18.04, ROS Melodic, C++, Opencv 3.4.16
git clone git@github.com:mkyun2/ROS_SORT.gitShould be executing YOLO-ROS before executing SORT
catkin_make
rosrun ros_sort ros_sort_nodeWorking Video
I refer to below
https://github.com/abewley/sort
https://github.com/mcximing/
https://github.com/engcang/
'maengkyun > Robotics' 카테고리의 다른 글
| Optimal Control - Dynamic Programming(1) (0) | 2022.07.31 |
|---|---|
| RRT:Rapidly Exploring Random Tree 경로 생성 알고리즘 (0) | 2022.07.14 |
| Objetc Tracking 개념 (0) | 2022.06.12 |
| [Kalman Filter] OpenCV Library (0) | 2022.05.01 |
| [Kalman Filter] 개념 및 예제 정리(1) - Battery Voltage Mesurement (0) | 2022.04.24 |
