직접 노드 통신을 통해 메시지를 주는방법도 있을 것 같은데, 일단 예제소스가 있어 활용해보았다.
cd ~/catkin_ws/src
git clone https://github.com/Jaeyoung-Lim/modudculab_ros.git
cd ..
catkin_makeroscore
-----------------------------
make px4_sitl_default gazebo
-----------------------------
roslaunch modudculab_ros ctrl_pos_gazebo.launch
----------------------------------------------- 각각 다른 터미널창에서 실행
rosrun mavros mavsafety arm
rosrun mavros mavsys mode -c OFFBOARD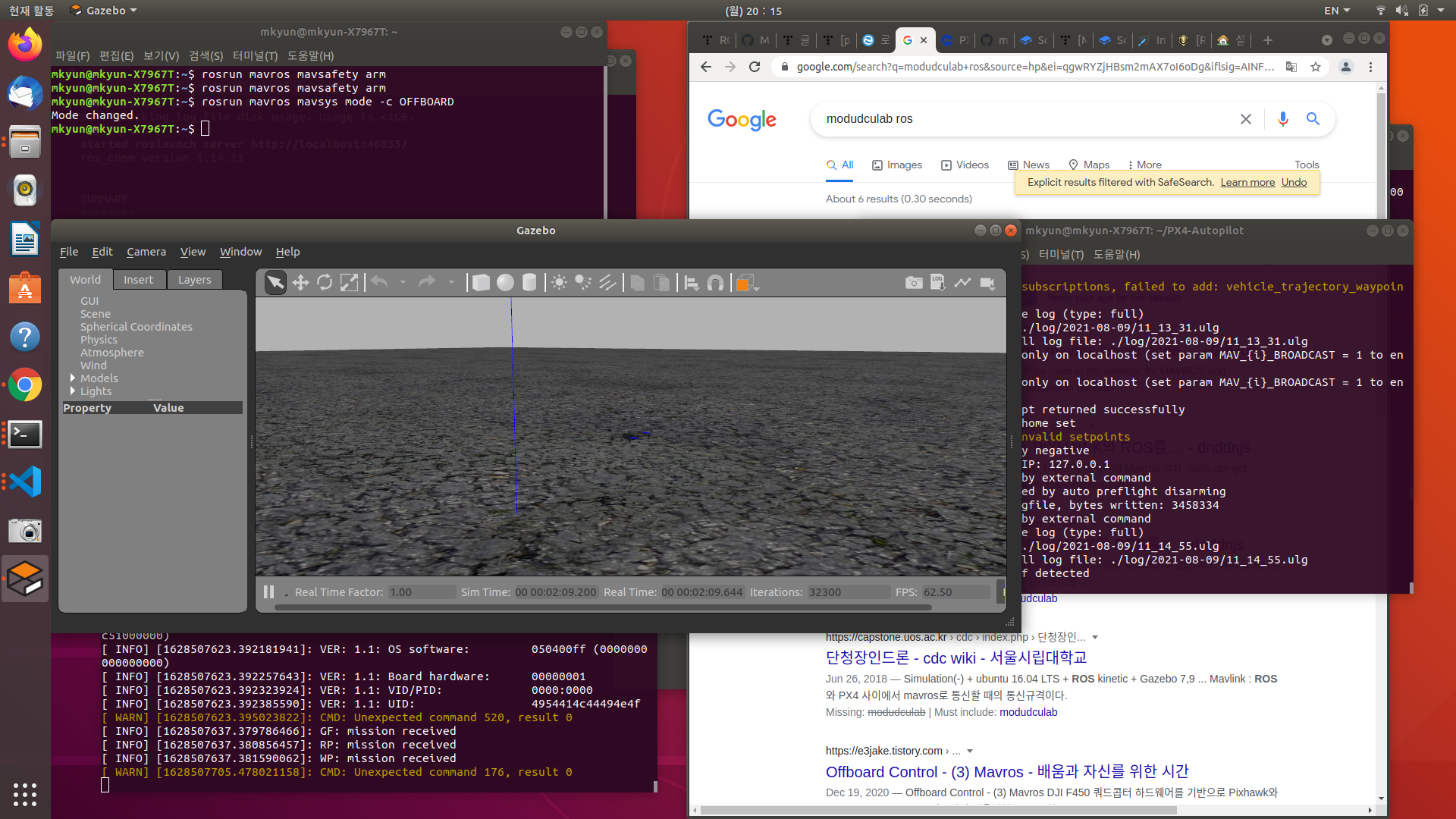
1미터 상공에서 호버링 하는 모습을 볼 수 있다. modudculab/src/pub_setpoints_pos.cpp을 수정하면 원하는 위치로 조정가능하다.

간단하게 반복 이동하면서 현재 위치를 출력하게끔 수정해보았다.
위치를 받아오기위해서는 PoseStamped에 mavros/local_position/pose 토픽을 subcribe 해야했다. 일일히 뜯으면서 하려니 시간도 오래걸리고..
#include <ros/ros.h>
#include <std_msgs/String.h>
#include <stdio.h>
#include "geometry_msgs/PoseStamped.h"
#include "geometry_msgs/Vector3Stamped.h"
geometry_msgs::PoseStamped current_pose;
void state_cb(const geometry_msgs::PoseStamped::ConstPtr& msg){
current_pose = *msg;
ROS_INFO("Received(x,y,z): %4.2f, %4.2f, %4.2f\n",current_pose.pose.position.x,current_pose.pose.position.y,current_pose.pose.position.z);
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "pub_setpoints");
ros::NodeHandle n;
ros::Publisher chatter_pub = n.advertise<geometry_msgs::PoseStamped>("/mavros/setpoint_position/local",10);
ros::Subscriber chatter_sub = n.subscribe<geometry_msgs::PoseStamped>("/mavros/local_position/pose",10,state_cb);
ros::Rate loop_rate(100);
ros::spinOnce();
geometry_msgs::PoseStamped msg;
int count = 1;
int plus = 1;
//PositionReciever qp;:
//Body some_object;
//qp.connect_to_server();
while(ros::ok()){
//some_object = qp.getStatus();
// some_object.print();
//printf("%f\n",some_object.position_x);
msg.header.stamp = ros::Time::now();
msg.header.seq=count;
msg.header.frame_id = 1;
if (current_pose.pose.position.x>20)
{
plus=1;
}
msg.pose.position.x = 1.0+plus;//0.001*some_object.position_x;
msg.pose.position.y = 2.0+plus;//0.001*some_object.position_y;
msg.pose.position.z = 5.0;//0.001*some_object.position_z;
//msg.pose.orientation.x = 0;
//msg.pose.orientation.y = 0;
//msg.pose.orientation.z = 0;
//msg.pose.orientation.w = 1;
chatter_pub.publish(msg);
ros::spinOnce();
count++;
plus++;
loop_rate.sleep();
}
return 0;
}
log file 기록
mkdir ~/logfiles
cd logfiles/
rostopic list -v //topic 확인
rosbag record -O logfilename topic
일정시간 후
rosbag info iris_default_1.bag
rqt_bag 으로 열어서 저장한 로그파일 열기
(publish 체크하기)

'maengkyun > Pixhawk' 카테고리의 다른 글
| 정리할 것 list (0) | 2021.08.12 |
|---|---|
| ROS 개인정리 (0) | 2021.08.09 |
| ROS 노드 작성과 빌드 (0) | 2021.08.09 |
| [pixhawk] gazebo simulation 재도전 (0) | 2021.08.07 |
| [pixhawk] simulation using gazebo,px4 [수정] (2) | 2021.07.20 |
