
Velocity Obstacle이 무엇인지 -> [클릭] VO :: Velocity Obstacles 문제 각 에이전트는 서로 통신하지 않고 독립적으로 탐색, 장애물 및 환경의 다른 에이전트와 충돌하지 않아야함 A와 B를 같은 환경에서 주행하는 로봇이라고 하자. A와 B는 각 자신을 기준으로 robonote.tistory.com Reciprocal Velocity Obstacles는 Velocity Obstacle을 multi-agent system에 적용하였을때 발생하는 Oscillation 문제를 해결한 것이 주요 Contribution이고 Velocity Obstacle의 Symmetry, Translation Invariance등 주요 성질을 이용해서 RVO가 Collision Avoidance와..

문제 각 에이전트는 서로 통신하지 않고 독립적으로 탐색, 장애물 및 환경의 다른 에이전트와 충돌하지 않아야함 A와 B를 같은 환경에서 주행하는 로봇이라고 하자. A와 B는 각 자신을 기준으로 하였을때 상대 로봇인 A혹은 B는 Obstacle 즉 피해야 할 장애물이다. 측정을 통해 장애물의 모양, 위치와 속도를 알고, 속도는 일정하다고 가정한다. 이때 A를 기준으로 한다면 B의 상대속도는 다음과 같이 표현할 수 있다 [Fig.2] A의 반지름 : rA B의 반지름 : rB Local하게 장애물을 회피하기 위해서 Collision Cone 개념을 도입하는데 A의 상대속도 벡터가 Collision Cone 영역내에 존재 한다면 충돌한다고 얘기할 수 있고 Collision Cone 영역은 A와 B가 충돌하는 A..
$$ 1 + 2 = 3 $$ // 덧셈 $$ 3 - 2 = 1 $$ // 뺄셈 $$ 2 \times 4 = 8 $$ // 곱셈 $$ 8 \div 2 = 4 $$ // 나눗셈 $$ (1 + 2) $$ // 소괄호 $$ \lbrace1 + 2\rbrace $$ // 중괄호 $$ [1 + 2] $$ // 대괄호 $$ \left( \frac{2}{3} \right) $$ // 괄호 자동 리사이징 $$ \Bigg( \bigg( \Big( \big( ( ) \big) \Big) \bigg) \Bigg) $$ $$ 2^2 = 4 $$ // 윗첨자 $$ a_1, a_2 $$ // 아랫첨자 $$ \frac{1}{2} $$ $$ ^1 / _2 $$ 로그 (log) $$ \log_b a $$ 거듭제곱근 (Root) $$ \..

AS5048A Encoder는 SPI, PWM 두가지 방식으로 연결이 가능하다. 하지만 보드에 따라서 SPI 혹은 PWM 방식만 가능한 경우가 있는데 Simple BGC Regular ver. 사용 시 PWM방식으로 사용이 가능하고 이는 메뉴얼에도 배선도까지 자세히 나와있다. 하지만 Simple BGC Extended ver. 사용 시 PWM방식은 불가능하다. 기존 메뉴얼에 Regular와 Extended 구분없이 다 PWM SPI 지원한다고 나와있었지만 온갖 방법을 동원해도 Extended는 PWM방식이 안되고 Regular는 PWM 연결방식만 존재한다. 이후 Basecamelectronics 커뮤니티에서 특정 보드의 경우 PWM 방식이 비활성화 된다는 게시글을 확인하였다. 그래서 SPI 연결을 위해 ..

Limit Cycle의 수렴반경과 방향을 조절하여 충돌 없이 장애물을 회피하며 목표점에 도달하는 방법 다음과 같은 비선형 시스템을 고려. 그리고 이때 Lyapunov function은 다음과 같다고 하자. 시스템의 궤적을 따라 V(x)를 미분한 값은 다음과 같다. V(x)는 Positive Definite이고 V'(x)는 negative definite을 만족해야한다. (V(x)>1 인경우 negative V(x)
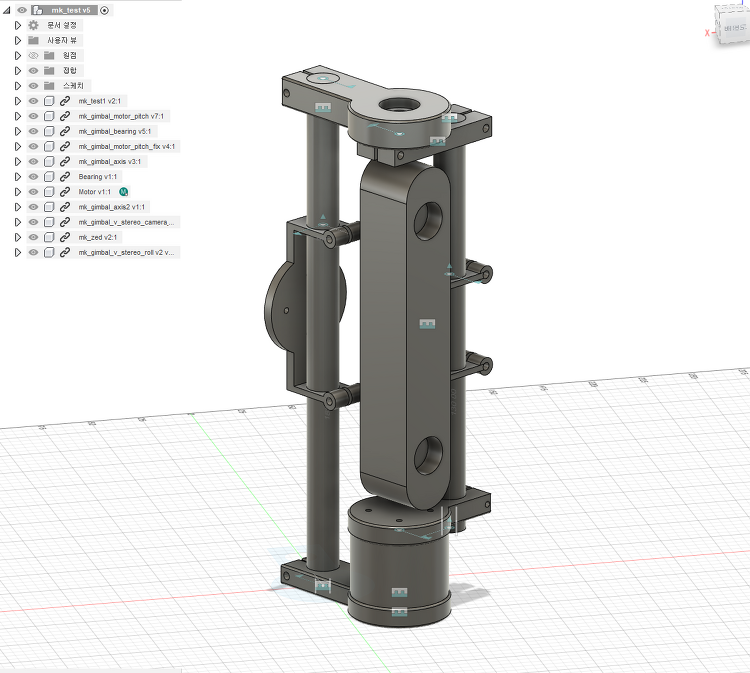
스테레오 카메라 사용을 위해 어쩔 수 없이 새로 설계하는 수밖에 없었고 디자인은 인터넷상에서 참고하였고 후배의 도움을 받았다. 하드웨어 세팅하면서 시간이 많이 소요된것 같다.. 한번에 하는게 중요하지만 시도하면서 생기는 문제점들 ㅜㅜ Solidworks만 학부수업때 써봤는데 Autodesk사의 fusion 360은 처음써본다. 3d 프린터로 프린팅할 수 있어서 편한 것 같다.