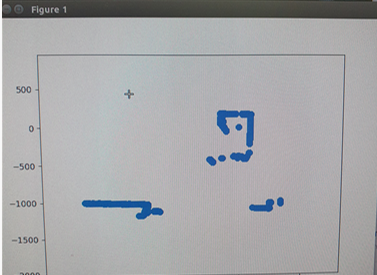
두번째 버전 수정했다 나름 괜찮게 나오는거 같고?
대충 형상에 맞게 나온다.

import serial
import serial.tools.list_ports as sp
import math
import numpy as np
import struct
from matplotlib import pyplot as plt
import time
class LCcali:
lx=[]
ly=[]
def connect(comport,baudrate):
open_com=serial.Serial(comport,baudrate)
open_com.isOpen()
return open_com
def scan(serial):
open_com=serial
value=bytearray([int('a5',16),int('60',16)])
open_com.write(value)
return open_com
def receive(serial):
read_data = serial.read(6000)
n=read_data.count(b"\xaa\x55")
while(n>0):
#print(n)
a=read_data.find(b"\xaa\x55")
read_data=read_data[a:]
lsn = read_data[3]
n=n-1
#print(n)
if(lsn!=1):
#print('lsn:',lsn)
fsa1= read_data[4]
fsa2= read_data[5]
lsa1= read_data[6]
lsa2= read_data[7]
start_angle=(fsa2*64.0 + fsa1/4.0)/32.0
end_angle=(lsa2*64.0 + lsa1/4.0)/32.0
#print(start_angle,end_angle)
for i in range(1,lsn):
if(end_angle - start_angle<0):
lsn_angle=((end_angle+360.0-start_angle)/(lsn-1))*i+start_angle
if(lsn_angle > 360.0):
lsn_angle=lsn_angle-360.0
else:
lsn_angle=((end_angle-start_angle)/(lsn-1))*i+start_angle
lsn_distance = (read_data[8+2*i+1]*64.0 + read_data[8+2*i]/4.0)
if(int(lsn_distance)==0):
lsn_angle = lsn_angle
else:
lsn_angle=lsn_angle+math.atan2(21.8*((155.3-lsn_distance)),155.3*lsn_distance)*180/math.pi
#print(math.atan(21.8*((155.3-lsn_distance)/155.3*lsn_distance))*180/math.pi)
#print(lsn_angle)
lidar_x=lsn_distance*math.cos(lsn_angle*(math.pi/180))
lidar_y=lsn_distance*math.sin(lsn_angle*(math.pi/180))
LCcali.lx.append(lidar_x)
LCcali.ly.append(lidar_y)
return LCcali.lx, LCcali.ly
def plot(lidar_x,lidar_y):
plt.cla()
plt.ylim(-9000,9000)
plt.xlim(-9000,9000)
plt.scatter(lidar_x,lidar_y)
plt.show()
open_com=LCcali.connect('/dev/ttyUSB1',128000)
open_com=LCcali.scan(open_com)
for i in range(50):
lx,ly=LCcali.receive(open_com)
LCcali.plot(ly,lx)
import serial
import serial.tools.list_ports as sp
import math
import numpy as np
import struct
from matplotlib import pyplot as plt
import time
list = sp.comports()
connected =[]
for i in list:
connected.append(i.device)
print("Connected COM PORTS: "+str(connected))
open_com=serial.Serial('/dev/ttyUSB0',128000)
open_com.isOpen()
value=bytearray([int('a5',16),int('60',16)])
open_com.write(value)
#open_com.write(bytes(bytearray([0xA5, 0x60])))
lx=[]
ly=[]
for a in range(50):
rx=[]
buf_idx=0
n=1024
parsing_count=[]
time.sleep(0.001)
while(n>0):
read_data = open_com.read()
#rx[buf_idx]=read_data.split(b'')
#print(read_data)
read_data=struct.unpack('b',read_data)
#print(read_data)
#if(read_data==(85,)):
#print('sccc')
rx.append(read_data)
#print(read_data)
if(rx[buf_idx]==(85,) and rx[buf_idx-1]==(-86,)):
parsing_count.append(1024 - n+1)
#print('parsing:',parsing_count)
#if(read_data.find("x") != -1 ):
# rx.append(int(read_data.split('x')[1].split("'")[0],16))
n-=1
buf_idx+=1
#print(rx)
#rx_packet = rx.decode('ascii')[:len(open_com)-1]
#print(int(rx,16))
#print(int(rx))
lsn = rx[parsing_count[-2]+1][0]
if(lsn==40):
#print('lsn:',lsn)
fsa1= rx[parsing_count[-2]+2]
fsa2= rx[parsing_count[-2]+3]
lsa1= rx[parsing_count[-2]+4]
lsa2= rx[parsing_count[-2]+5]
start_angle=(fsa2[0]*64.0 + fsa1[0]/4.0)/32.0
end_angle=(lsa2[0]*64.0 + lsa1[0]/4.0)/32.0
#print(start_angle,end_angle)
for i in range(lsn):
if(end_angle - start_angle<0):
lsn_angle=((end_angle+360.0-start_angle)/(lsn-1))*i+start_angle
if(lsn_angle > 360.0):
lsn_angle=lsn_angle-360.0
else:
lsn_angle=((end_angle-start_angle)/(lsn-1))*i+start_angle
#print('lsn-',i,parsing_count[-2]+8+2*i+1,'parsing: ',rx[parsing_count[-2]+8+2*i+1][0])
lsn_distance = (rx[parsing_count[-2]+8+2*i+1][0]*64.0 + rx[parsing_count[-2]+8+2*i][0]/4.0)
#print(lsn_distance)
#angle Correction
if(lsn_distance<0.1):
lsn_angle = lsn_angle
else:
lsn_angle=lsn_angle+math.atan2(21.8*(155.3-lsn_distance),155.3*lsn_distance)
lidar_x=lsn_distance*math.cos(lsn_angle*(math.pi/180))
lidar_y=lsn_distance*math.sin(lsn_angle*(math.pi/180))
lx.append(lidar_x)
ly.append(lidar_y)
#print('x:',lidar_x,'y:',lidar_y)
plt.scatter(lx,ly)
plt.show()
open_com.close()'maengkyun > Robotics' 카테고리의 다른 글
| assda (0) | 2021.08.31 |
|---|---|
| Camera Lidar Calibration [정리중] (0) | 2021.07.16 |
| ROS ydlidar (0) | 2021.07.08 |
| ros package build (0) | 2021.07.07 |
| pseudo inverse, svd (0) | 2021.07.06 |
