SIFT features 물체 전체를 매칭 Spatial Pyramid Matching - 이미지들의 특징들이 이 장면이어떤 종류인지 단서를 줄 수 있다. Support Vector Algorithm 적용 Image Classification Pipeline assume given set of discrete labels {dog, cat, truck, plane} Problem: Semantic gap --> pixel wise Challenges: Deformation, Occlusion, Background clutter, Intraclass variation image classifier ex) def predic(image): return class_label test image 1, 50000..
spin()은 콜백만 처리(Blocking) spinOnce()는 한번 콜백을 처리하고 넘어간다. (Non-blocking) rate.sleep()은 무한루프에서 설정한 주기를 맞추기 roslaunch는 하나 이상의 정해진 노드를 실행시킬 때 사용 -노드를 실행할 때 패키지의 파라미터나 노드 이름변경, 노드 네임스페이스 설정 ROS ROOT, PACKAGE PATH 설정, 환경변수 변경 등의 옵션을 붙일 수 있다. 다른 패키지에서 다음과 같은 형식으로 호출 mavros를 호출하고 mavros setpoint_position topic에 메시지를 넘기기 위한 노드실행 해당 소스코드는 modudculab_ros 코드 ex> -----------------------------------------------..
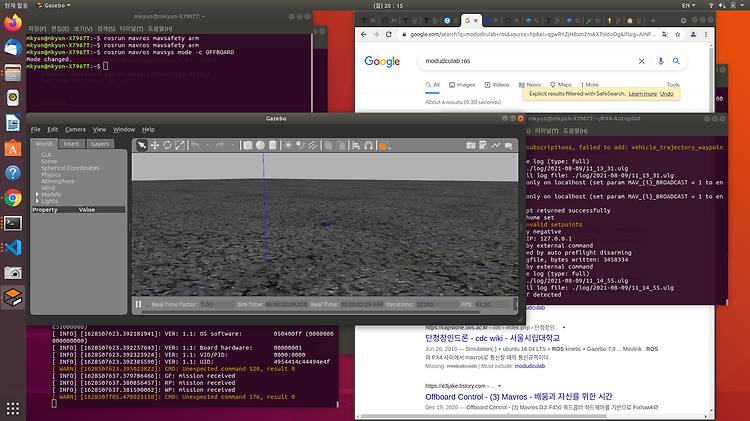
직접 노드 통신을 통해 메시지를 주는방법도 있을 것 같은데, 일단 예제소스가 있어 활용해보았다. cd ~/catkin_ws/srcgit clone https://github.com/Jaeyoung-Lim/modudculab_ros.gitcd ..catkin_makeroscore-----------------------------make px4_sitl_default gazebo-----------------------------roslaunch modudculab_ros ctrl_pos_gazebo.launch----------------------------------------------- 각각 다른 터미널창에서 실행rosrun mavros mavsafety armrosrun mavros mavsys..