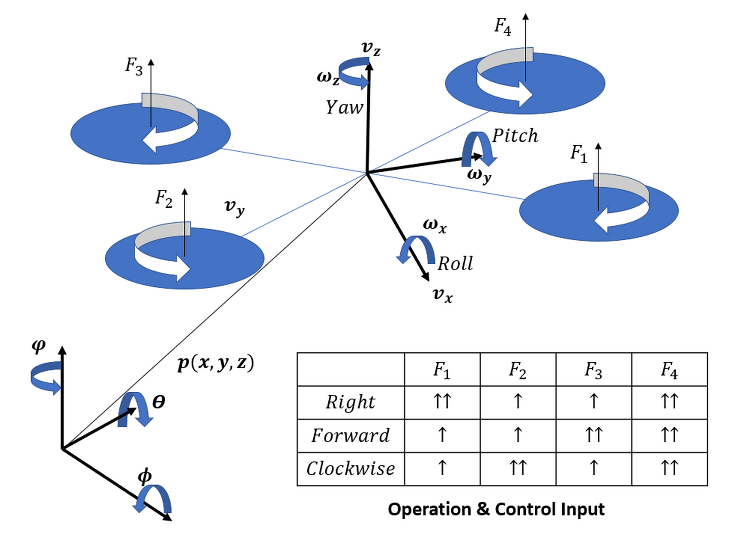
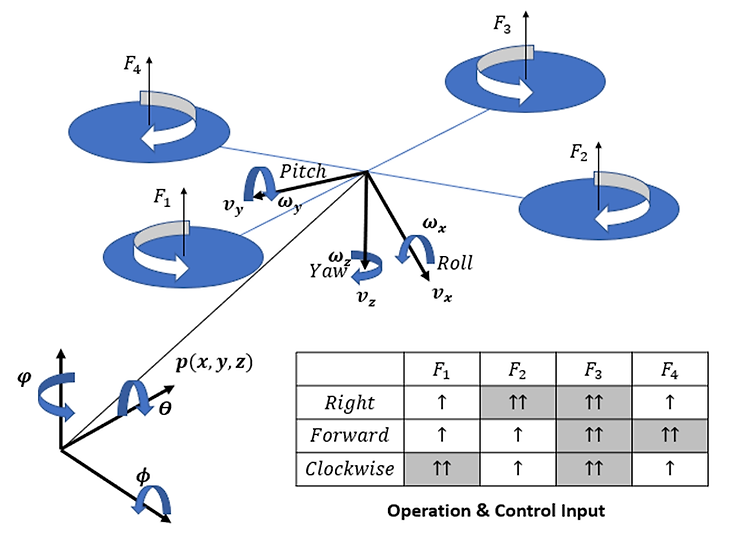
다음과 같이 구성하였을 때 모든 위치가 수렴하기까지 14초정도 소요된 것으로 보인다. PID 게인은 임의로 지정하였고 문서에 기록 되어있음. 쿼드의 무게는: 1 로터까지의 길이는 0.3m이다. 제어입력: Position(7, -10, 5), Heading(1 rad) 왼쪽 위치, 오른쪽 속도 노란선 X, 파란선 Y, 주황선 Z 왼쪽 각도, 오른쪽 각속도 노란선 Roll, 파란선 Pitch, 주황선 Yaw https://github.com/mkyun2/Quadrotor GitHub - mkyun2/Quadrotor: Dynamics and Controller Dynamics and Controller. Contribute to mkyun2/Quadrotor development by creating an ..
단순 Throttle Input - 초기 Throttle = 10N 이후 9.80N 높이축이 중력을 이겨내고 상승 이후 Throttle이 중력을 이기지 못하고 하강하는 것을 볼 수 있음. 참조 - Lim, Jeonggeun. “Autonomous target following and monitoring with collision avoidance based on an Lidar on a multi-copter” https://www.cs.cmu.edu/afs/cs.cmu.edu/academic/class/16311/www/s15/syllabus/ppp/Lec08-Control3.pdf
2주전 즈음 multi agent의 충돌 문제와 관련된 논문을 읽다가 관심이 좀 생겼는데, 좀 더 큰 틀에서의 문제에 대해 알아보고 이후에 시간내서 알아볼 예정 AGV (Automated Guided Vehicle)은 물류/유통 센터나 공항 터미널 시설에서 많이 활용된다고 한다. 물류 분야에서 보면 Amazon Robotics가 처음 도입했던 RMFS ( Robotic Mobile Fulfillment System)이 있다. 이 시스템은 피킹을 위해 작업자가 선반까지 이동하는 대신 AGV와 함께 협업 함에 따라 소요되던 시간의 절반 이상을 절약할 수 있었는데, 이는 장애물이 없는 정해진 공간 환경에서 반복/지속적인 작업을 수행 하는 것이 매우 효과적이기 때문이다. - 물류센터와 같은 환경에 로봇을 도입함..

Velocity Obstacle이 무엇인지 -> [클릭] VO :: Velocity Obstacles 문제 각 에이전트는 서로 통신하지 않고 독립적으로 탐색, 장애물 및 환경의 다른 에이전트와 충돌하지 않아야함 A와 B를 같은 환경에서 주행하는 로봇이라고 하자. A와 B는 각 자신을 기준으로 robonote.tistory.com Reciprocal Velocity Obstacles는 Velocity Obstacle을 multi-agent system에 적용하였을때 발생하는 Oscillation 문제를 해결한 것이 주요 Contribution이고 Velocity Obstacle의 Symmetry, Translation Invariance등 주요 성질을 이용해서 RVO가 Collision Avoidance와..

문제 각 에이전트는 서로 통신하지 않고 독립적으로 탐색, 장애물 및 환경의 다른 에이전트와 충돌하지 않아야함 A와 B를 같은 환경에서 주행하는 로봇이라고 하자. A와 B는 각 자신을 기준으로 하였을때 상대 로봇인 A혹은 B는 Obstacle 즉 피해야 할 장애물이다. 측정을 통해 장애물의 모양, 위치와 속도를 알고, 속도는 일정하다고 가정한다. 이때 A를 기준으로 한다면 B의 상대속도는 다음과 같이 표현할 수 있다 [Fig.2] A의 반지름 : rA B의 반지름 : rB Local하게 장애물을 회피하기 위해서 Collision Cone 개념을 도입하는데 A의 상대속도 벡터가 Collision Cone 영역내에 존재 한다면 충돌한다고 얘기할 수 있고 Collision Cone 영역은 A와 B가 충돌하는 A..

AS5048A Encoder는 SPI, PWM 두가지 방식으로 연결이 가능하다. 하지만 보드에 따라서 SPI 혹은 PWM 방식만 가능한 경우가 있는데 Simple BGC Regular ver. 사용 시 PWM방식으로 사용이 가능하고 이는 메뉴얼에도 배선도까지 자세히 나와있다. 하지만 Simple BGC Extended ver. 사용 시 PWM방식은 불가능하다. 기존 메뉴얼에 Regular와 Extended 구분없이 다 PWM SPI 지원한다고 나와있었지만 온갖 방법을 동원해도 Extended는 PWM방식이 안되고 Regular는 PWM 연결방식만 존재한다. 이후 Basecamelectronics 커뮤니티에서 특정 보드의 경우 PWM 방식이 비활성화 된다는 게시글을 확인하였다. 그래서 SPI 연결을 위해 ..