겉으로는 틀만 제공해준다는 느낌? 직접 구현하는 것과 달라보이지는 않지만 더 빠른 연산을 위한 어떠한 차이가 있을지 모르겠다. Library #include #include Function cv::KalmanFilter predict(), correct(Mat measurement) 예측-->statePre, 추정-->statePost cv::Mat statePre predicted state cv::Mat statePost corrected state cv::Mat transitionMatrix A or F cv::Mat controlMatrix B cv::Mat measurementMatrix H cv::Mat processNoiseCov Q cv::Mat measurementNoiseCov R cv..

Goal 장애물과 장애물 사이의 간격이 로봇의 크기만큼 혹은 그보다 좁을 경우 하나의 장애물로 만들어버리는 것 Reference https://ieeexplore.ieee.org/abstract/document/9006905 Obstacle Magnification for 2-D Collision and Occlusion Avoidance of Autonomous Multirotor Aerial Vehicles Collision or occlusion avoidance is one of the most important functions of autonomous unmanned vehicles when maneuvering or conducting missions, including monitoring ..

사용장비 Ouster GEN2 OS-1-32 Goal Sparse한 Point Cloud를 이용한 Depth image를 Dense하게 만들어주기 위함 Classical image processing 기법: Morpology 연산(Erode, Dilation, ..), Median, Gaussian Filter 사용하였음 Image상에서 같은 Object의 정보를 담고있는 pixel은 이웃한 Pixel일 것이다. 라는 가정을 깔고간다. Reference Arxiv - In Defense of Classical Image Processing: Fast Depth Completion on the CPU
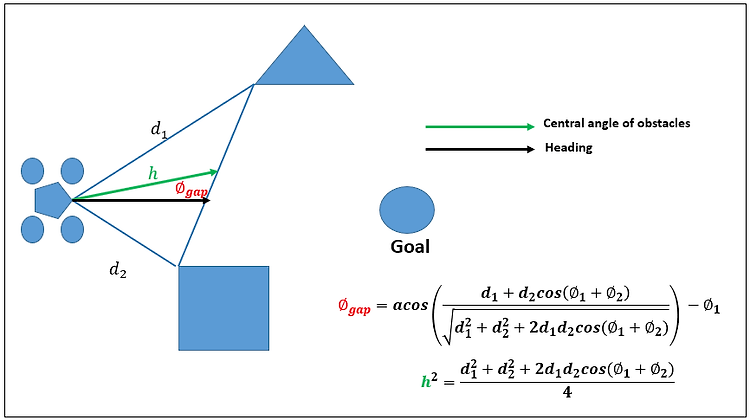
영상은 드론뷰, 지상 캠코더뷰, 시뮬레이션 순서 Goal 목표 지점을 향해 비행 중 장애물이 존재할 경우 빈 공간 사이로 지나가는 장애물 회피 알고리즘 시뮬레이션 이후 현실 검증 Reference FollowGapMethod - https://www.sciencedirect.com/science/article/pii/S0921889012000838 A novel obstacle avoidance algorithm: “Follow the Gap Method” In this paper, a novel obstacle avoidance method is designed and applied to an experimental autonomous ground vehicle system. The proposed m..
env: python3, ros melodic ImportError: dynamic module does not define module export function (PyInit__tf2) 1.sudo apt install python3-catkin-pkg-modules python3-rospkg-modules python3-empy 2.catkin_ws/src git clone https://github.com/ros/geometry.git - b melodic-devel git clone https://github.com/ros/geometry2.git - b melodic-devel 3.catkin_make