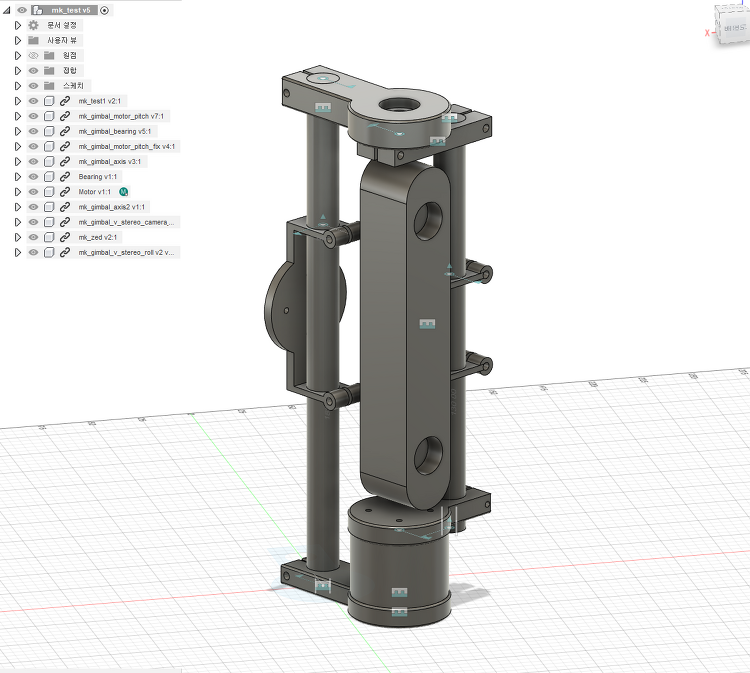
스테레오 카메라 사용을 위해 어쩔 수 없이 새로 설계하는 수밖에 없었고 디자인은 인터넷상에서 참고하였고 후배의 도움을 받았다. 하드웨어 세팅하면서 시간이 많이 소요된것 같다.. 한번에 하는게 중요하지만 시도하면서 생기는 문제점들 ㅜㅜ Solidworks만 학부수업때 써봤는데 Autodesk사의 fusion 360은 처음써본다. 3d 프린터로 프린팅할 수 있어서 편한 것 같다.

Optimal Control은 Dynamic Control System에서 Goal state와 Current state의 error를 Performance measure(Cost function)로 표현하고 이를 최소화하는 최적의 Control variable, 'u'를 찾는 문제 State Equation, Performance measure(J) 정의 mxm Square Matrix H, Q는 positive semi definite H,Q가 모든 벡터 x에대해서 transpose(x)*Hx>=0 nxn Square Matrix R positive definite R가 모든 벡터 u에대해서 transpose(u)*Hu>0 →We can minimize J Principle of optimality,..

Optimal Control은 Dynamic Control System에서 Goal state와 Current state의 error를 Cost function으로 표현하고 최소화하는 최적의 Control variable, 'u'를 찾는 문제이다.여기서 state는 u를 포함한다. Dynamic System은 State Equation에의해 정의할 수 있다. (1). F=ma(2). x'=f(x,t) 여기서 시스템이 control variable 'u'에 따라 변화를 가진다면 --> x' = f(x,u,t) 그렇다면 Control variable에 따라 시스템의 출력이 변한다면 어떻게 최적의 u를 찾아낼까일반적으로 Deterministic optimal control 방법이 두 가지 존재한다고 한다.1..

고속도로나 자동차 전용도로에서 차로변경, 조향, 가감속, 차간거리 차선유지등의 기능을 수행하기위해서 매순간 정확한 경로생성이 필요하다. 대표적인 경로생성 알고리즘 = RRT*, RRT, A star, Dijkstra, Aritificial Potential Field 등등 https://github.com/mkyun2/RRT_Algorithm GitHub - mkyun2/RRT_Algorithm: Rapidly Exploring Random Tree Rapidly Exploring Random Tree. Contribute to mkyun2/RRT_Algorithm development by creating an account on GitHub. github.com 개념 무작위 샘플링(Random Sam..
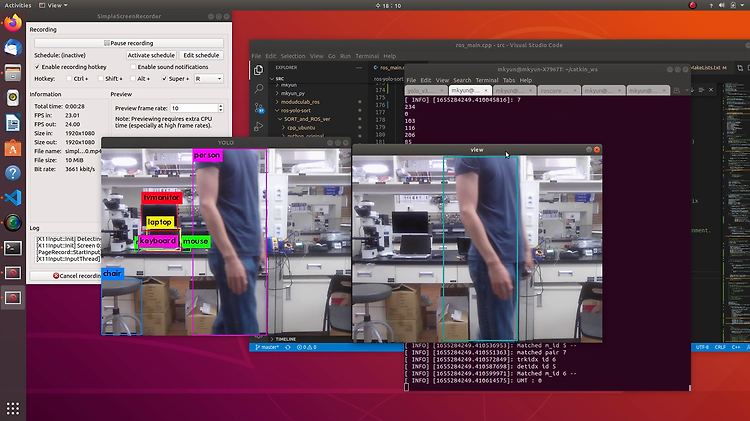
Darknet은 별도로 실행시키셔서 Published Bounding Boxes를 칼만필터 이용해 Tracking 합니다. Tracked Boxes는 다시 publishing 합니다. CPP 수정하다가 멈춘 파일을 발견해서 Ros에서 작동되게끔 수정해보았습니다. https://github.com/mkyun2/ROS_SORT GitHub - mkyun2/ROS_SORT Contribute to mkyun2/ROS_SORT development by creating an account on GitHub. github.com Blue:Prediction Green:Measurement Red:Correction Process Noise Measu..

Object Tracking - 객체 추적 객체 추적을 왜 해야할까? 이산 시간 t = 1 ~ n 까지 존재한다고 할 때 t=1에서 Detection한 Object가 t=n에서 Detection한 Object와 동일한 Object인지 판단 할 필요가 있을때 필요하다고 생각한다. 예를들어 카메라를 통해 매 순간 이미지가 생성되고 우리는 그것을 Frame이라고 부른다. 매 순간 들어오는 Frame에서 어떤 한 객체를 감지하고 그것을 관심있게 들여다보기 위함인 것이다. 관심있게 들여다보려면 그것이 이전 프레임에서 검출되고 계속해서 지금도 검출되는 것이 동일해야한다. 그럼 어떻게 ? 검출된 Object에 어떠한 특징 정보를 가져와서 특정한 ID를 부여한다면 매 순간 새롭게 검출된 Object가 이전 순간에 검출..